
WIRES#014
WIRES#014
Development process
WIRES#014

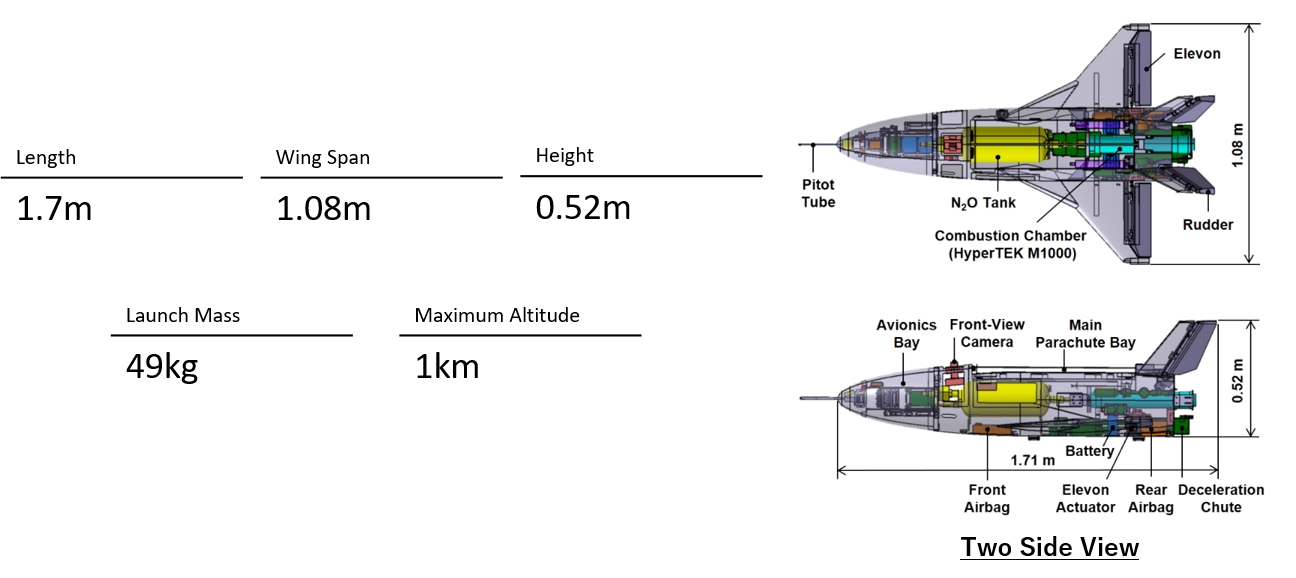
Since 2012, Space Systems Laboratory has been developing a winged rocket named WIRES#014. The main missions of this vehicle are to test the autonomous navigation, guidance and control (NGC) system and the recovery system using a two-stage parachute system. The total length is 1.7[m] and the initial mass is approximately 40 [kg]. We have ever built three vehicles as WIRES#014.
WIRES#014-1
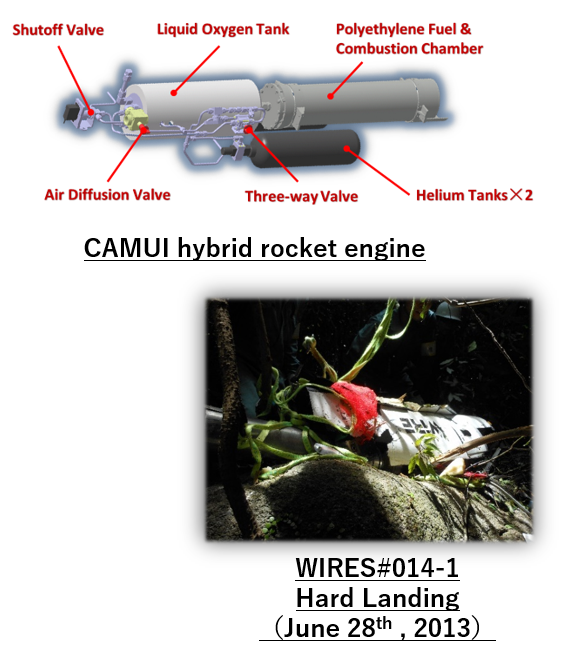 The propulsion system of WIRES#014-1 employs a hybrid rocket motor CAMUI (Cascaded Multistage Impinging-jet). WIRES#014-1 was tested in June 28th, 2013, to demonstrate the flight control system using aerodynamic control surface (elevon and rudder). However, due to the malfunctions with the Air Data System (ADS) and the control law, the vehicle reached only an altitude of about 600[m], and the gliding flight was unsuccessful. The emergency system for safe recovery worked, but the rocket crashed on the ground before the deployment of the main parachute
The propulsion system of WIRES#014-1 employs a hybrid rocket motor CAMUI (Cascaded Multistage Impinging-jet). WIRES#014-1 was tested in June 28th, 2013, to demonstrate the flight control system using aerodynamic control surface (elevon and rudder). However, due to the malfunctions with the Air Data System (ADS) and the control law, the vehicle reached only an altitude of about 600[m], and the gliding flight was unsuccessful. The emergency system for safe recovery worked, but the rocket crashed on the ground before the deployment of the main parachute
WIRES#014-2
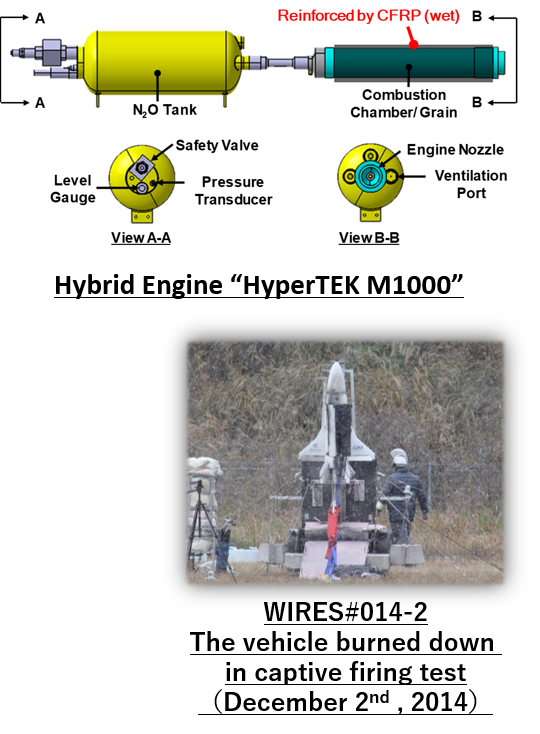 The structure type of WIRES#014-2 is changed from semimonocoque structure to monocoque structure in order to reduce the weight. And also, WIRES#014-2 utilises a commercial hybrid engine “HyperTEK M1000”. A ground combustion test of WIRES#014-2 was conducted on December 2nd, 2014, which suffered engine failure. The rear part of the rocket was severely damaged. After the ground combustion test, we investigated the cause of accident, and found by CT (Computed Tomography) scan that there is much void was a problem with the fabrication of the engine.
The structure type of WIRES#014-2 is changed from semimonocoque structure to monocoque structure in order to reduce the weight. And also, WIRES#014-2 utilises a commercial hybrid engine “HyperTEK M1000”. A ground combustion test of WIRES#014-2 was conducted on December 2nd, 2014, which suffered engine failure. The rear part of the rocket was severely damaged. After the ground combustion test, we investigated the cause of accident, and found by CT (Computed Tomography) scan that there is much void was a problem with the fabrication of the engine.
WIRES#014-3
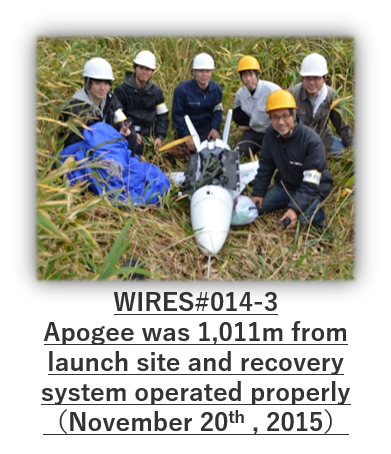 The grain which is reinforced with CFRP is used and a ground combustion test of WIRES#014-3 is successfully conducted. A successful flight has been conducted in November 20th , 2015. The vehicle was recovered safely by using a two-stage parachute system. However, the flight analysis revealed that there were some problems with the ADS (Air Data Sensing) system, the actuator for the aerodynamic control surface and the NGC system.
The grain which is reinforced with CFRP is used and a ground combustion test of WIRES#014-3 is successfully conducted. A successful flight has been conducted in November 20th , 2015. The vehicle was recovered safely by using a two-stage parachute system. However, the flight analysis revealed that there were some problems with the ADS (Air Data Sensing) system, the actuator for the aerodynamic control surface and the NGC system.
WIRES#014-3A
WIRES#014-3A utilizes the airframe structure of WIRES#014-3 which was successfully recovered. The main goal of this vehicle is to solve the problems encountered on WIRES#014-3.
MISSIONS
Demonstration of navigation, guidance and control (NGC) system
- Navigation system: Sensing position, velocity and attitude using 5-hole pitot tube, IMU and GPS sensor
- Guidance system: Azimuth and path angle control based on velocity vector
- Control system: Attitude control by typical PD control law
Demonstration of recovery system
- The Two-stage parachute system
→1st Stage: Deploying a small parachute to decelerate the vehicle
→2nd Stage: Deploying a parachute to reduce impact at landing - Airbag system: Reducing impact when the vehicle is landing
Reach an altitude of 1km
- Ascending flight above an altitude of 1km using hybrid engine
The main improvement of WIRES#014-3A
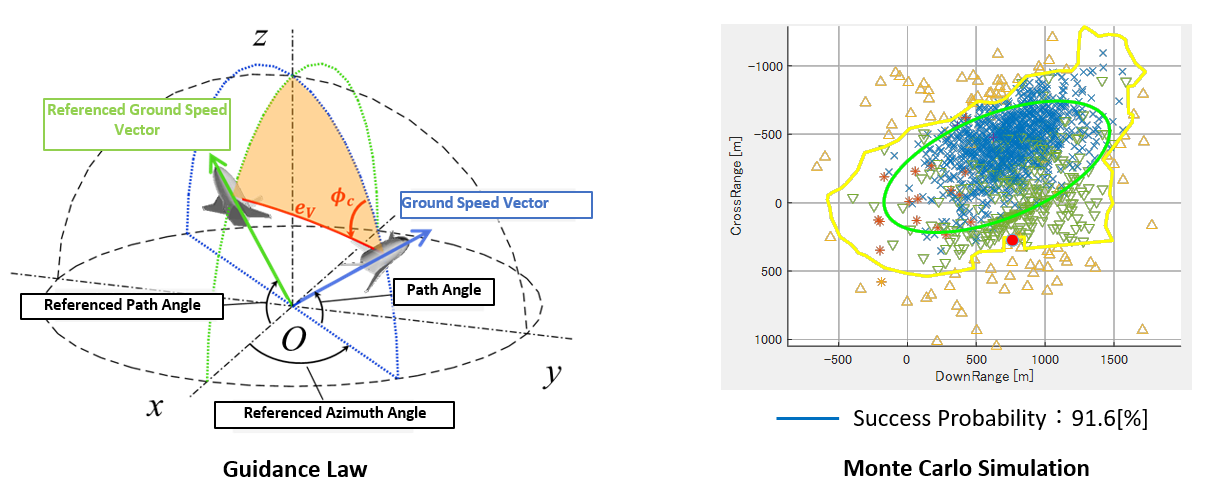
・Introduction of guidance law that can correct deviation from reference trajectory
The ground speed deviation is calculated from the reference path angle, azimuth angle and the state quantity of the rocket in flight, and the aircraft is banked to the direction to cancel the deviation, and the path is controlled by tilting the direction of lift.
・Re-selected actuator of elevons
Due to insufficient actuator performance, the roll angle while the rocket ascended could not be controlled in the flight test of WIRES#014-3. An actuator of elevon that satisfies the torque and speed requirements was selected.
・ADS (Air Data Sensing) System improvements
Before the flight experiment, I could not notice the leak of the pipe and the failure of the sensor. By re-selecting the joints and improving maintainability, the joints can be viewed directly, and abnormalities can be confirmed before flight tests.
・Monte Carlo simulation
Because there are various uncertainties in rocket dynamics, e.g. NGC system, recovery system, and environment, it is necessary to safely carry out from launch to landing under all conditions. Therefore, we consider random uncertainties in numerical flight simulation.
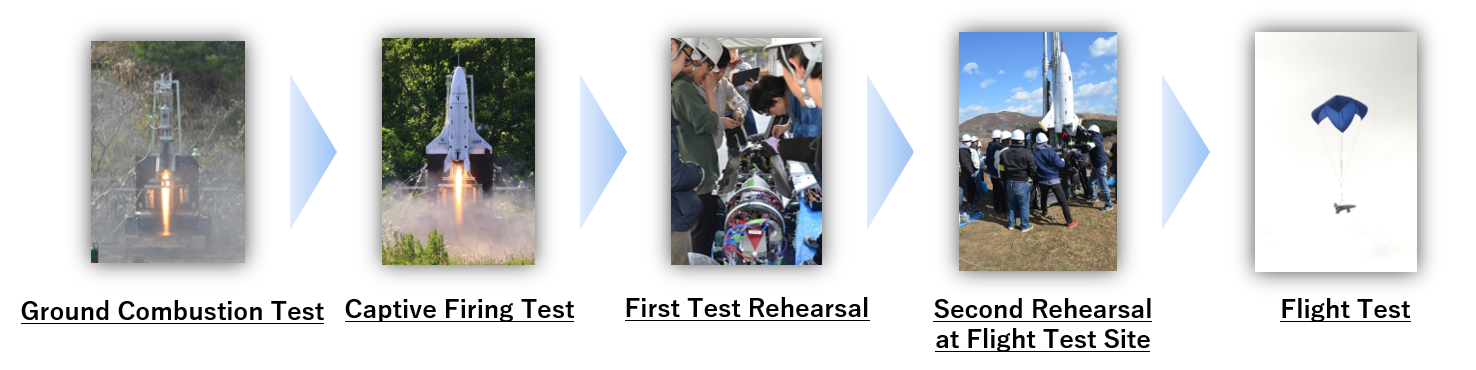
Preparation for flight test
・Because the safety of rocket flight test is very important, we conduct some trials, e.g. ground combustion test and test rehearsals. As all trials are carried out correctly, we conduct flight test.
HiLS (Hardware in the Loop Simulation)
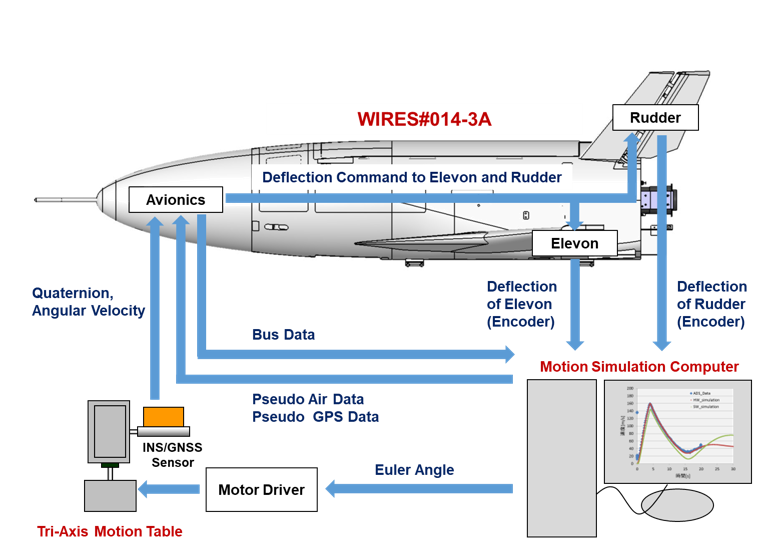 The HiLS can be used to evaluate the performance using the actual sub-systems in the simulation using realistic environment variables such as dead time, communication delay, noise, and mechanical actuation of components. The on-board system is performed by HiLS on the ground in advance.
The HiLS can be used to evaluate the performance using the actual sub-systems in the simulation using realistic environment variables such as dead time, communication delay, noise, and mechanical actuation of components. The on-board system is performed by HiLS on the ground in advance.
Results of WIRES#014-3A Flight Test
 The flight test of WIRES#014-3A was conducted on March 17th , 2020. As a result, the rocket crashed on the ground before the opening of the main parachute and we lost this vehicle. Currently, the post-flight analysis is in progress.
The flight test of WIRES#014-3A was conducted on March 17th , 2020. As a result, the rocket crashed on the ground before the opening of the main parachute and we lost this vehicle. Currently, the post-flight analysis is in progress.