
WIRES#014
WIRES#014
これまでの開発の流れ
WIRES#014

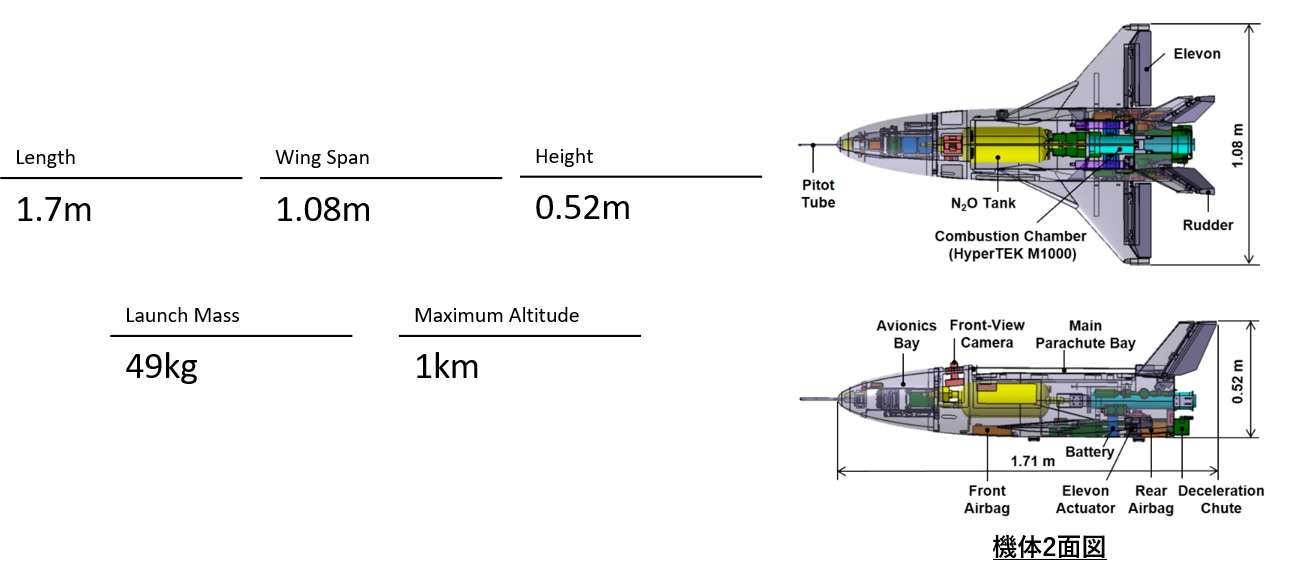
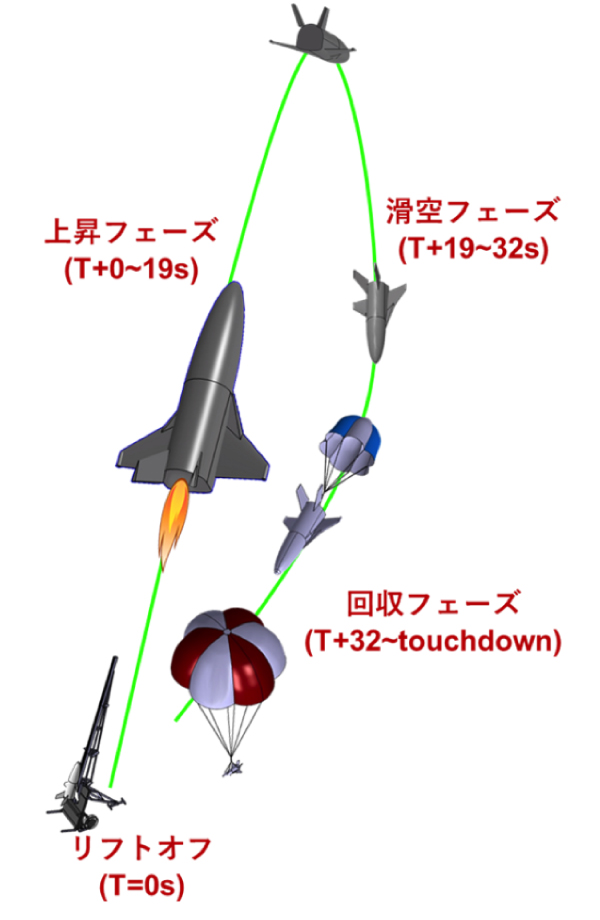
2012年より宇宙システム研究室(米本研究室)では自律航法誘導制御システムの実証と2段階パラシュートとエアバックによる機体回収システムの実証を目的としたWIRES#014の設計,製作から飛行実験までしています.WIRES#014の機体規模は,全長が1.7m,乾燥重量が約40kgです.これまでにWIRES#014として試験結果をフィードバックし,改良を重ねながら3つの機体を製作しました.
WIRES#014-1
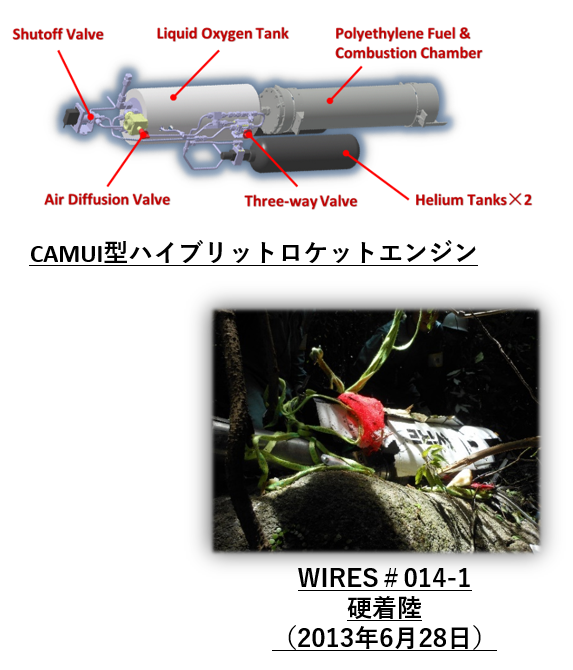 WIRES#014-1は,2013年6月28日に空力舵面を用いた上昇と滑空時の姿勢制御システムの実証を主な目的として飛行実験を実施しました.エンジンには,CAMUI(Cascaded Multistage Impinging-jet)型ハイブリットロケットエンジンを搭載していました.CAMUI型ハイブリットロケットエンジンは,予定通り約4秒間の正常に燃焼しましたが,ADS (Air Data Sensing) システムの不具合と姿勢制御に失敗により,機体はロールしながら当初の予定高度1000mよりも低い高度約600mまでしか到達しませんでした.非常系操作を行い強制的に減速シュート,引き続きメインシュートの開傘指令を送信しましたが,メインシュートを開傘することができず,結果として機体は硬着陸し,大きく損傷してしまいました.
WIRES#014-1は,2013年6月28日に空力舵面を用いた上昇と滑空時の姿勢制御システムの実証を主な目的として飛行実験を実施しました.エンジンには,CAMUI(Cascaded Multistage Impinging-jet)型ハイブリットロケットエンジンを搭載していました.CAMUI型ハイブリットロケットエンジンは,予定通り約4秒間の正常に燃焼しましたが,ADS (Air Data Sensing) システムの不具合と姿勢制御に失敗により,機体はロールしながら当初の予定高度1000mよりも低い高度約600mまでしか到達しませんでした.非常系操作を行い強制的に減速シュート,引き続きメインシュートの開傘指令を送信しましたが,メインシュートを開傘することができず,結果として機体は硬着陸し,大きく損傷してしまいました.
 WIRES#014-2
WIRES#014-2
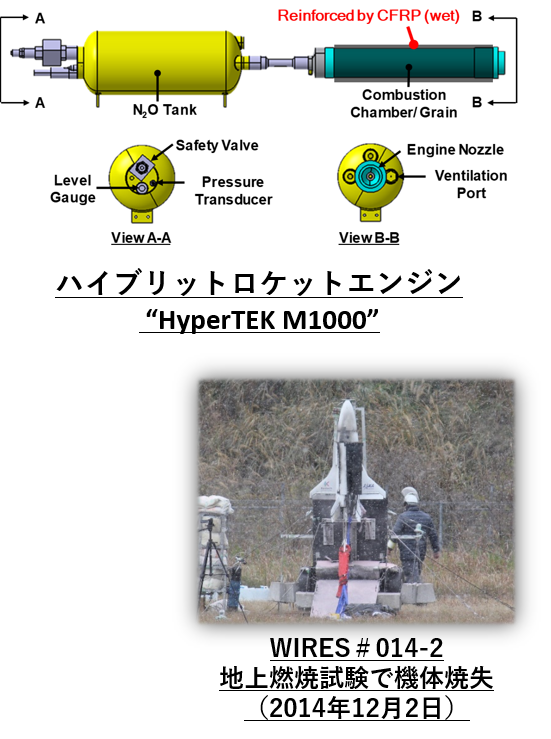
WIERS#014-2の開発では,機体構造をセミモノコック構造からモノコック構造に変更し軽量化を図りました.また,エンジンをCAMUI型ハイブリットロケットエンジンからHyperTEK M1000に変更しました.2014年12月2日にエンジンシステムを確認するため,機体にエンジンを搭載した状態での燃焼試験を実施しました.しかし,燃焼時のエンジン損傷が原因で機体内部に火炎が充満し機体が損傷してしまう結果となりました.CTスキャンによりボイドの少ないグレインを選定していましたが,ノズル付近が非常に薄肉によるノズルの脱落が原因でエンジンが損傷したと結論づけました.
 WIRES#014-3
WIRES#014-3
WIRES#014-3では,CFRPで補強したグレインを使用することで,地上燃焼試験に成功しました.2015年11月20日にWIRES#014-3の飛行実験を実施し,高度も目標である約1000mまで上昇し,その後滑空飛行及び回収機構による軟着陸に成功しました.しかしながら,上昇中の誘導則が不十分であったことと,姿勢制御に使用するアクチュエータの性能不足が原因で予定していた飛行軌道と異なる軌道を飛行してしまいました.
WIRES#014-3A
WIRES#014-3Aは,回収に成功したWIERS#014-3を使用し,飛行後解析で判明した問題点に対する設計改良,及び新たな誘導則を実装しました.
目 的
 航法誘導制御システムの実証
航法誘導制御システムの実証
航法システム:5孔ピトー管、INS/GPSセンサ
誘導システム:速度ベクトルに元づいた方位角、経路角制御
制御システム:PD制御
機体回収システムの実証
2段パラシュートシステム
→1段目:機体を減速させるための減速シュート展開
→2段目:着地時の衝撃を緩和させるためのメインシュート展開
エアバックシステム:着地時の衝撃を緩和
高度1㎞上昇
ハイブリットエンジンを用いて高度1㎞以上の上昇飛行
WIRES#014-3A飛行実験に向けて
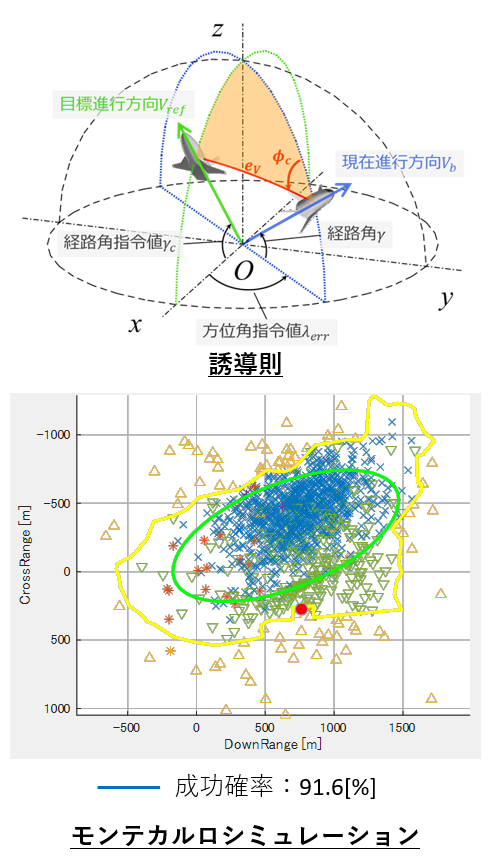
基準軌道とのずれを修正できる誘導則の導入
基準経路角,方位角と飛行中のロケットの状態量から偏差を算出し,偏差 を打ち消す方向に機体をバンクさせ,揚力の方向を傾けることで経路を制 御します
アクチュエータの再選定
アクチュエータの性能不足によりWIRES#014-3の飛行実験では上昇中のロール角を制御できませんでした.トルク要求,速度要求を満たすようなアクチュエータを再選定しました.
ADS (Air Data Sensing) システムの改良
飛行実験前に配管のリークやセンサの故障に気づくことができませんでした.継手の再選定及びメインテナンス性を向上させることで接続部を直接視認できるようにし,飛行実験前に異常を確認できるようにしました.
モンテカルロシミュレーション
ロケットの制御系には様々な不確定要素が存在するため,あらゆる条件においても安全に打ち上げから着陸まで行う必要があります.そこで,ソフトウェアシミュレーションでは様々な不確定要素をランダムかつ数多くの飛行シミュレーションを行います.
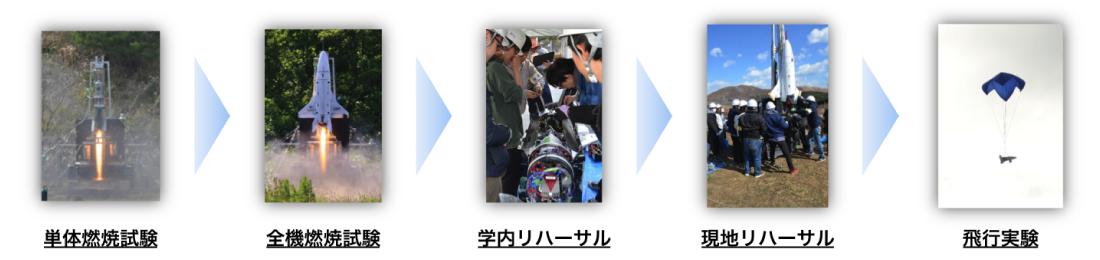
飛行試験までの流れ
ロケットは安全性が非常に重要なため,地上で出来得る各種試験を踏まえ飛行実験に望みます.
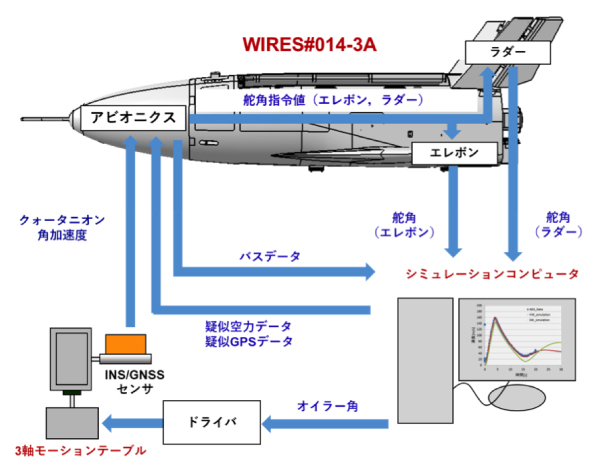
HiLS (Hardware in the Loop Simulation)
実機搭載システムの性能評価を予め地上で行います.実装されるマイコンやセンサ等の機器に,ソフトウェアで計算された擬似データを与えることで,実際の飛行をシミュレーションする試験.ソフトウェアではモデル化できない遅れやノイズ等の機器の特性を考慮することができ,何度も飛行実験を実施することなく様々な条件でシミュレーションすることが可能です.
WIRES#014-3Aの飛行実験結果
 WIRES#014-3Aは,2020年3月17日に飛行実験を実施しました.結果として機体は硬着陸し,大きく損傷してしまいました.現在は,機体に搭載されているSDカードのデータとテレメトリ情報から飛行後解析を実施中です.
WIRES#014-3Aは,2020年3月17日に飛行実験を実施しました.結果として機体は硬着陸し,大きく損傷してしまいました.現在は,機体に搭載されているSDカードのデータとテレメトリ情報から飛行後解析を実施中です.